หุ่นยนต์ลากอัตโนมัติ JUNO Robot รุ่น AX-6113T (D-300T)
หุ่นยนต์ลากอัตโนมัติ JUNO Robot รุ่น AX-6113T (D-300T)
หุ่นยนต์ลากอัตโนมัติ (Towing Robot) Juno Robot รุ่น AX-6113T (D-300T)
รองรับโหลดได้มากถึง 300kg มี AI ที่ฉลาดล้ำ JUNO ใช้ Lidar/IMU แบบ 360° บวกกับ RGB Camera ทำให้มีความเสถียรในการเดินและการหลบหลีกสิ่งกีดขวางก็ทำได้อย่างมีประสิทธิภาพ รองรับการเชื่อมต่อหลายรูปแบบ เดินในพื้นที่กว้างได้ถึง 50,000 ตร.ม สามารถใช้งานร่วมกันได้ถึง 100ตัว

คุณสมบัติ หุ่นยนต์ลากอัตโนมัติ Juno Robot รุ่น AX-6113T (D-300T)
- รองรับโหลดได้มากถึง 300kg
- เดินได้ทั้ง Indoor และ Outdoor
- หลบหลีกสิ่งกีดขวางอัตโนมัติ Lidar/IMU แบบ 360° รอบทิศทางมีความมั่นคงและปลอดภัย
- รองรับการสร้างแผนที่และการปรับแต่งระยะไกล Support remote สำหรับการแก้ไขและปรับใช้
- การแสดงสถานะการทำงานของหุ่นยนต์แบบ real-time
- ทำงานร่วมกันได้อย่างราบรื่น การไดนามิกตามลำดับความสำคัญของงาน ช่วยให้การนำส่งมีประสิทธิภาพและมีเสถียรภาพ
- Platform hardware และ software แบบเปิดโดยสมบูรณ์ มี interface API เอกสารสนับสนุนทางเทคนิคที่หลากหลาย ช่วยเหลือการพัฒนาผลิตภัณฑ์ตลอด
- เข้าถึงการปรับแต่งได้ตามความต้องการอย่างแท้จริง
- กลับไปยังแท่นชาร์จโดยอัตโนมัติเมื่อแบตเตอรี่ใกล้หมด
- แบตเตอรี่ใช้งานได้ถึง 10ชั่วโมงขึ้นไป

Terminal + management platform + cloud integration solution
- สั่งงานได้หลากหลายรูปแบบ phone, PAD, PC, etc.
- การมอนิเตอร์แบบเรียลไทม์
- วิเคราะห์ข้อมูลการใช้งาน
- เดินร่วมกันได้ถึง 100ตัว
- Open API: พัฒนาต่อได้อย่างง่ายดาย (ERP, WMS)
- รองรับการจัดส่งแบบระยะไกล

การเชื่อมต่อกับอุปกรณ์อื่นๆ ได้หลากหลาย
ลิฟท์โดยสาร ลิฟท์ขนส่ง ประตูอัตโนมัติ เครื่องสแกนบาร์โค้ด RFID อุปกรณ์ต่อพ่วงอุตสาหกรรมอื่นๆ หุ่นยนต์ JUNO ทุกรุ่นสามารถใช้ในโรงงานอิเล็กทรอนิกส์หรือห้อง Cleanroom ได้ซึ่งต่างจากรุ่น Standdard ทั่วไป โดยแจ้งความต้องการได้ที่ฝ่ายขายของเรา
คำแนะนำการใช้งาน หุ่นยนต์ลากอัตโนมัติ จะมีข้อแตกต่างจากรุ่นอื่นๆ
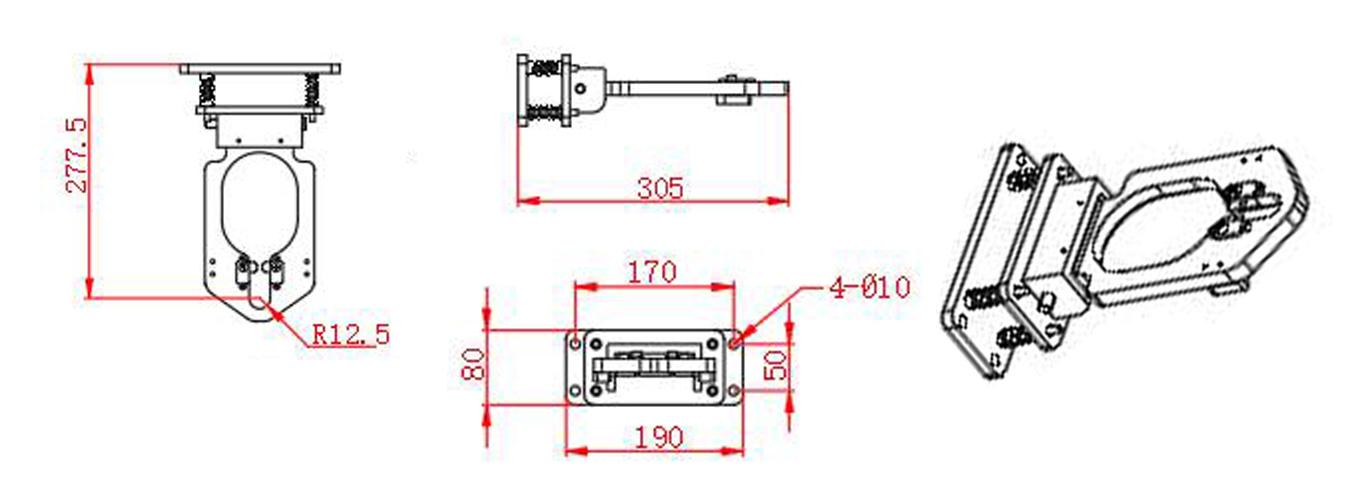
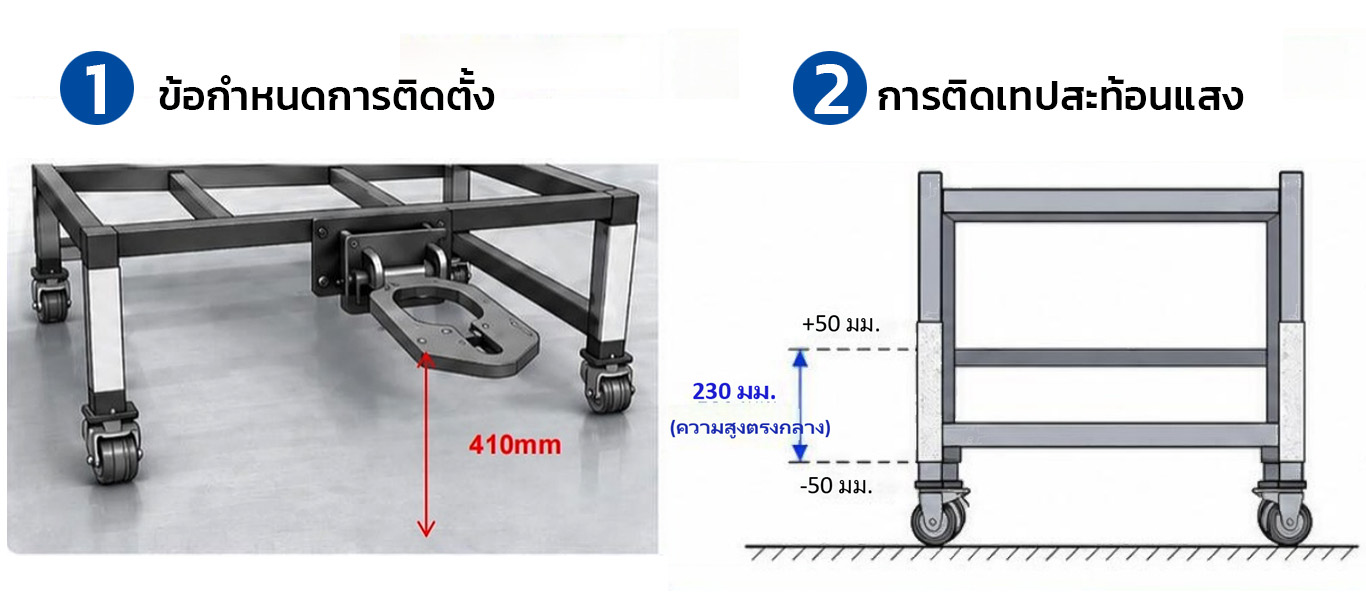 ติดตั้งอุปกรณ์ที่รถเข็นของท่าน วัดจากด้านบนขอบอุปกรณ์ข้อต่อยึดด้านหน้า ระยะความสูงต้องอยู่ที่ 410mm
ติดตั้งอุปกรณ์ที่รถเข็นของท่าน วัดจากด้านบนขอบอุปกรณ์ข้อต่อยึดด้านหน้า ระยะความสูงต้องอยู่ที่ 410mm
2. ติดเทปสะท้อนแสงที่ตำแหน่งนอกสุดของรถเข็นทั้ง2ด้าน ใช้ความสูงตรงกลาง 230mm จากพื้น และติดเทปในระยะ 50mm บนล่าง ให้สมมาตรทั้ง2ด้าน อย่าให้มีอะไรบัง
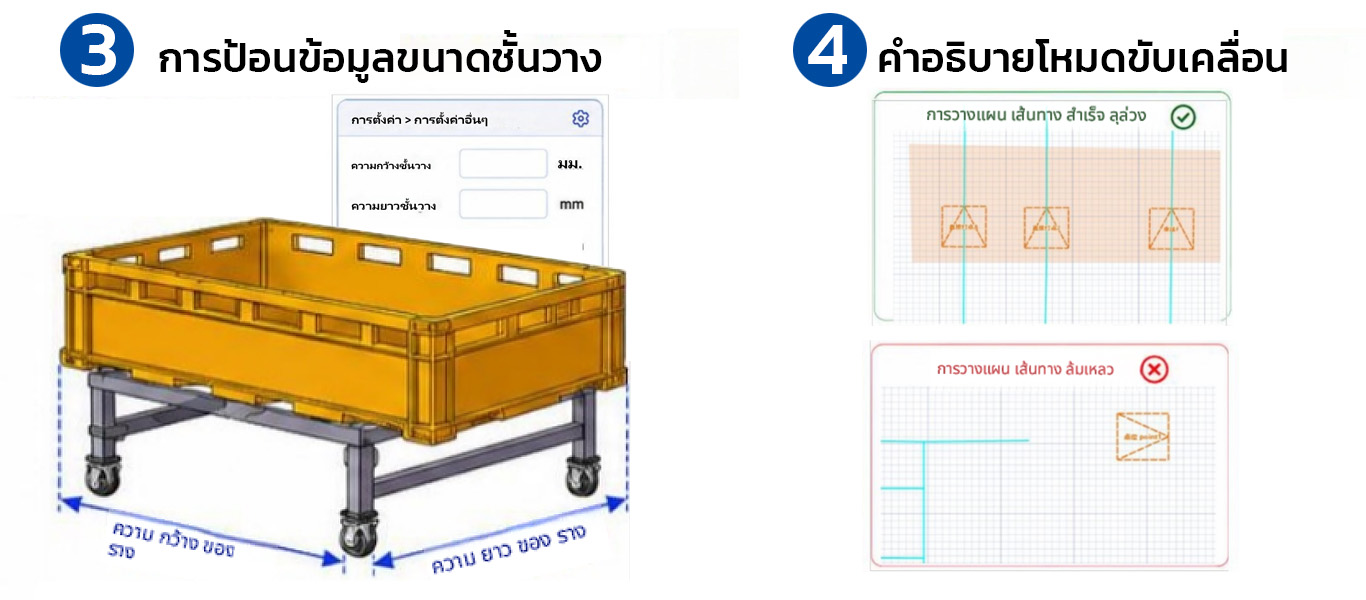
3.ตั้งค่าเพื่อกำหนดขอบระยะ หากมีการวางยื่นเกินให้กำหนดระยะขนาดภายนอก
4.หุ่นยนต์ต้องเดินทางและวางแผนเส้นทางตามราง และตำแหน่งจุดจะต้องอยู่บนและเชื่อมต่อกับราง หากจุดเชื่อมต่อกับราง การวางแผนเส้นทางจะสำเร็จ หากจุดไม่อยู่บนราง การวางแผนเส้นทางจะล้มเหลว
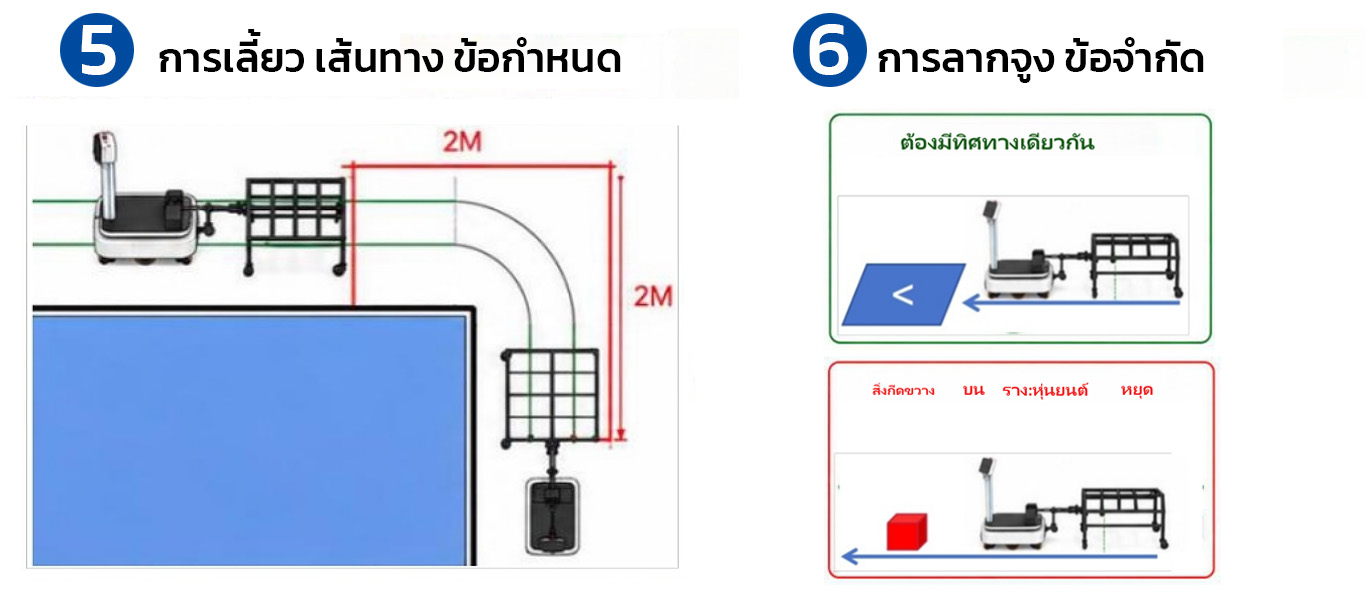
5. สำรองพื้นที่รางการเดินให้เพียงพอ เพื่อสร้างวงเลี้ยว หากพื้นที่ไม่เพียงพอการวางแผนเส้นทางจะล้มเหลว พื้นที่สีน้ำเงินแสดงถึงกำแพงขอบเขต รักษาระยะการเลี้ยวให้ปราศจากสิ่งกีดขวาง
6. เมื่อสั่งงานหุ่นยนต์จะไม่ถอยหลังหรือหลบสิ่งกีดขวาง หากพบสิ่งกีดขวางหุ่นยนต์จะหยุดนิ่ง
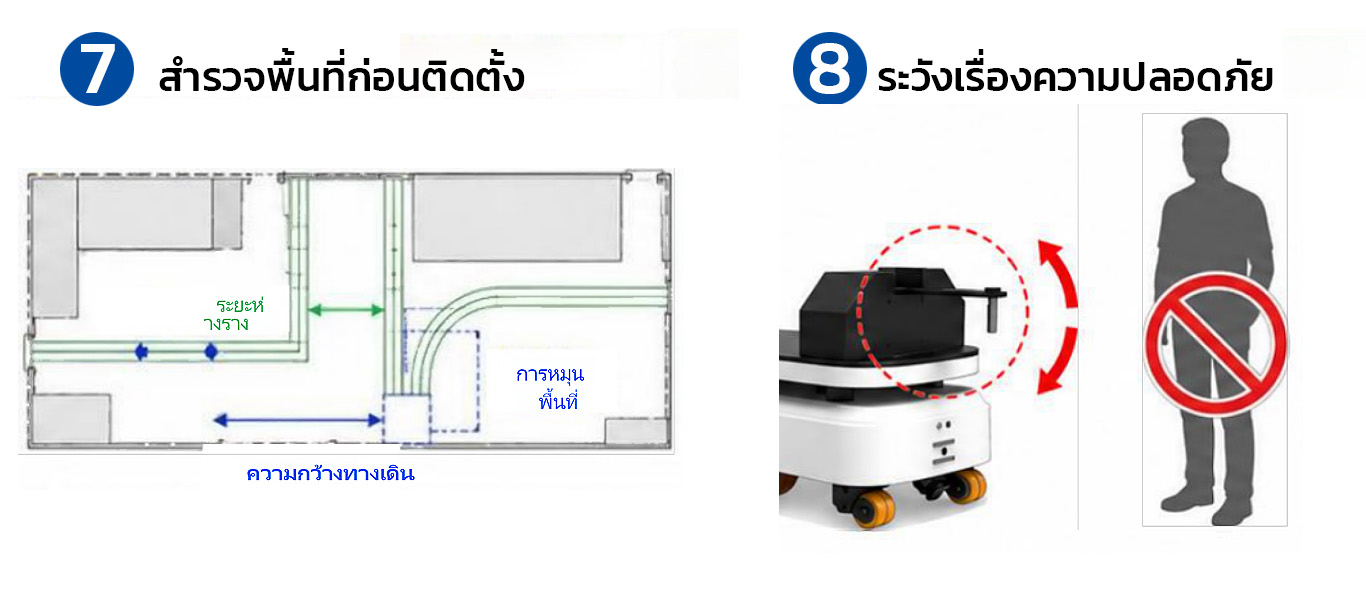
7. สำรวจพื้นที่การเดิน พื้นที่การหมุน การเลี้ยว ให้เรียบร้อยก่อนติดตั้ง
8. ระหว่างการต่อพ่วง บุคลากรห้ามไปยืนด้านหลังหุ่นยนต์ลากเด็ดขาด เพื่อความปลอดภัย
| AX-6113I (D-300T) Parameter | |
| Product size | 500*740*1240mm |
| Machine weight | 85kg |
| Maximum load capacity | 300kg |
| Battery time | Full load 10 hours |
| Standby time | >24h |
| Charging time | > 4Hr |
| Charging mode | Automatic / manual |
| Maximum speed | 0.1-1.2M/s |
| Minimum pass width | Less than equal to 65cm |
| Network Interface | Wi-Fi/4G/5G |
| Sensor | Single line Laser + Dual 3D cameras |
| Battery capacity | 30Ah |
| Service life | 20000h |
| การรับประกัน | 1 ปี |
| ค่าติดตั้ง | สอบถาม |
| MA รายปี (สูงสุด5ปี) ครอบคลุมอะไหล่ทุกชิ้น | 35,000 บาท/ปี |
| SERVICE | 3ครั้ง/ปี (FREE) |
| ราคา PROMOTION | 495,000 บาท |


 sun-robot
sun-robot
 sun-robot
sun-robot
 sun-robot
sun-robot